



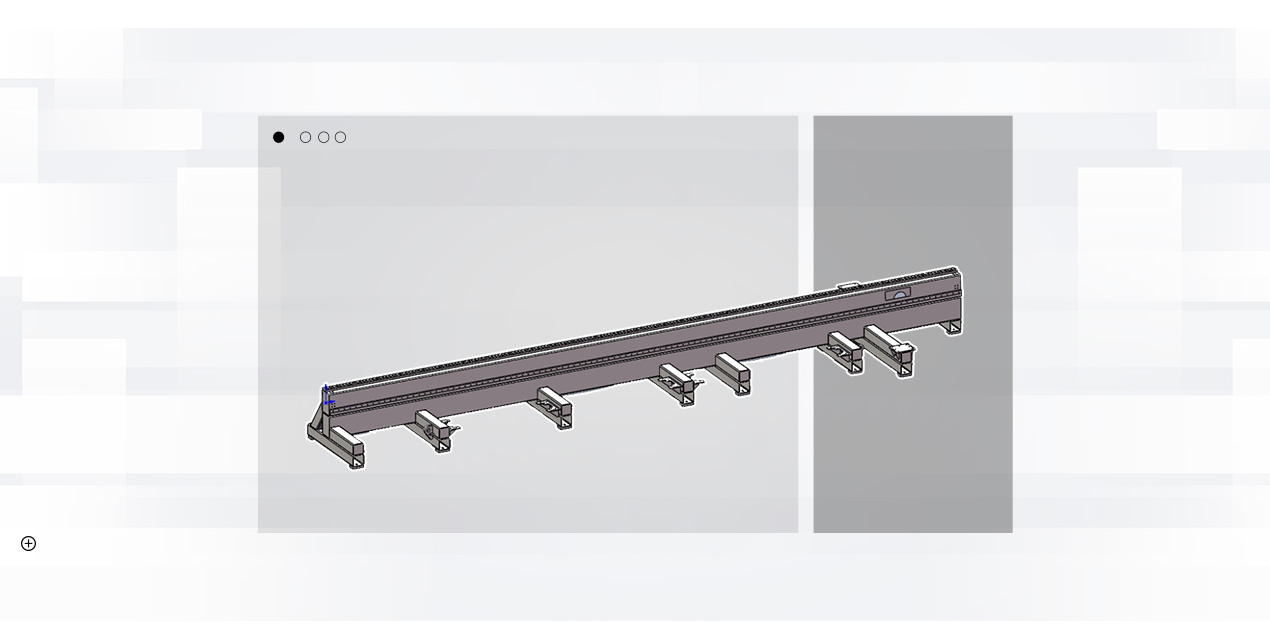
Lectus Unius Partis Soldatus Structurae Lateralis Pendentis
Lectus structuram lateralem pendentem et lectum unius partis sudatum, quod recoctum est ad tensionem internam eliminandam, adhibet. Post machinationem asperam, ante machinationem perfectam, senescentia vibrationis perficitur, ita rigiditatem et stabilitatem machinae magnopere augens et accuratiam machinae conservans. Impulsus motoris servo AC a systemate numerico moderatur, et mandrinum motum reciprocum in directione Y post impulsum motoris efficit, motum rapidum et motum alimentationis efficiens. Tam cremagliera axis Y quam linea rectoris ex materiis altae praecisionis fabricatae sunt, quae accuratiam transmissionis efficaciter praestant; interruptiones limitis in utroque fine ictus reguntur, et instrumentum limitis rigidi simul installatur, quod efficaciter securitatem motus machinae curat; machina instrumentum automaticum lubricationis oleum lubricantem partibus mobilibus lecti regularibus intervallis addit ut partes mobiles in bona conditione currant, quod vitam utilem ductorum, rotarum dentatarum et cremaglierarum emendare potest.
Instrumentum-Alimentandi-Anteriorem
Instrumentum anterius alimentationis laminam sustentatricem a cylindro aereo moderatam includit, quae tubum sustentat cum tubus sectus longus est et eum ne cedat impedit.
Cum res secatur, cylindrus sustentans elevatus laminam sustentantem sustinet ut tubum sustineat et ne cedat prohibet. Cum res secatur, cylindri sustentantes elevati omnes retrahuntur, et res ad laminam obturantem cadit et ad locum repositionis labitur. Actio cylindri a systemate automatice regitur.
Pars anterior etiam in genus sequendi et genus accommodationis manualis dividitur.


Mechanismi Auxilii
Duo genera mechanismorum sustentantium in lecto instituta sunt, et duo genera praesto sunt:
1. Fulcrum subsequens a servomotore independente regitur ut sursum deorsumque moveatur, praecipue ad fulcrum subsequentem peragendum in deformatione nimia tuborum longorum sectorum (tuborum cum diametro parvo). Cum mandrina posterior ad locum correspondentem movetur, fulcrum auxiliare deprimi potest ad vitandum.
2. Fulcrum rotae diametro variabili a cylindro tollitur et demittitur, et manu ad diversas scalarum positiones aptari potest ut tubos diversarum magnitudinum sustineat.
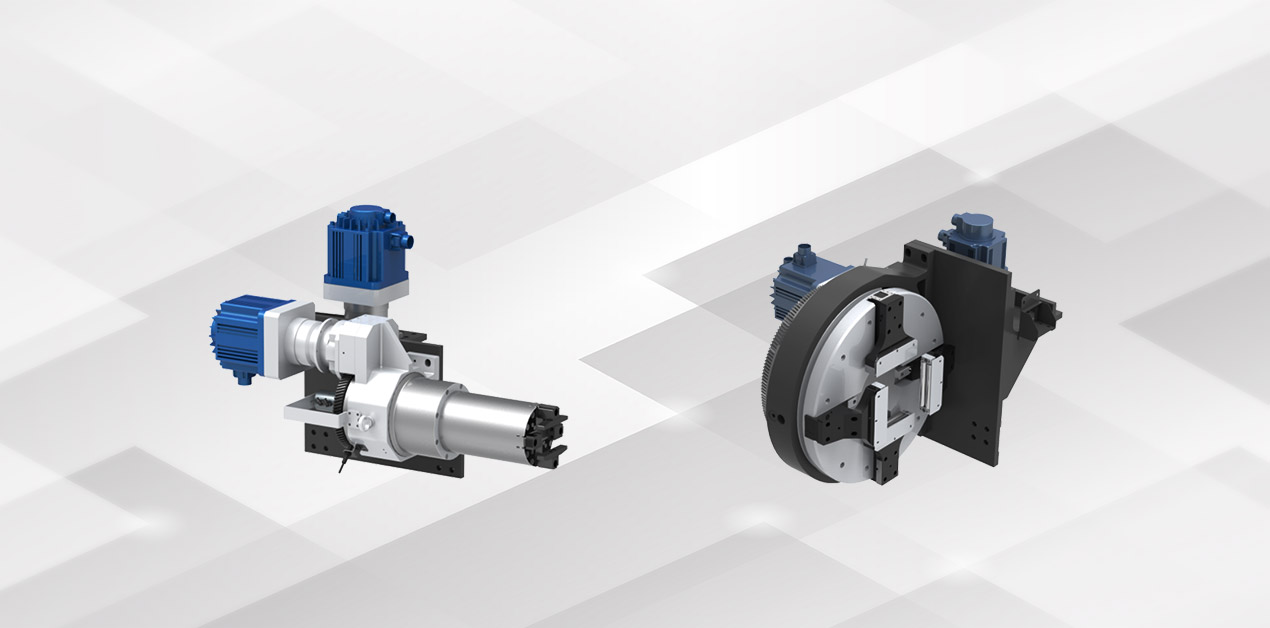
Pars Chuck
Mandrinum in duos mandrinos pneumaticos, anterius et posterius, pleno ictu instructos, dividitur, quorum ambo in directionem Y moveri possunt. Mandrinum posterius tubum prehendere et alere curat, mandrinum autem anterius in fine lecti ad materiam prehendendam collocatur. Mandrini anterius et posterius respective a motoribus servo aguntur ut rotationem synchronam efficiant.
Sub firmitate iuncturae mandrinorum duplicium, cauda brevis sectio fieri potest, et cauda brevis oris 20-40mm attingere potest, dum cauda brevis sectionem caudae longioris sustinet.
Machina secandi tubos seriei TN methodum motus et vitandi mandrini adhibet, quae sectionem duobus mandrinis omni tempore efficere potest, nec efficit ut tubus nimis longus et instabilis sit, nec praecisio sufficiens sit.
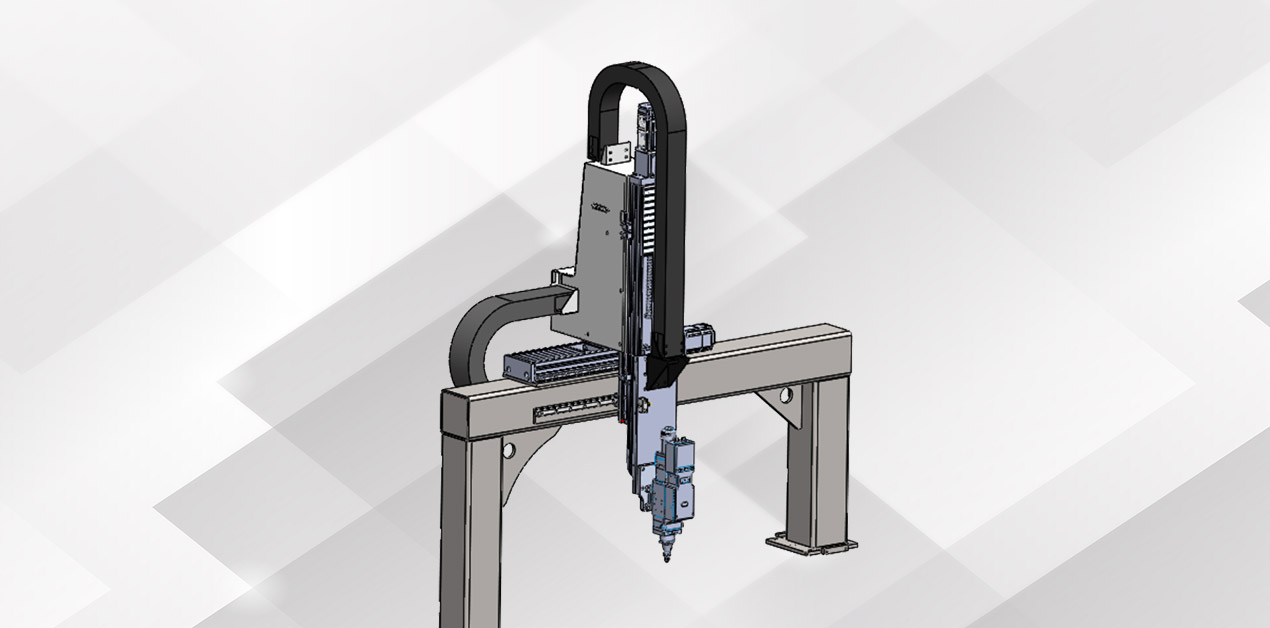
Axis-Dispositivum
Trabs transversalis instrumenti axis X structuram porticum habet, quae tubo quadrato et lamina ferrea conglutinatur. Pars portici in lecto fixa est, et axis X a servomotore impellitur ut cremaglieram et pinionem agat, ita ut motus reciprocus laminae labentis in directione X efficiatur. Dum motus fit, interruptor finis cursum moderatur ut positionem limitet, quo securitas operationis systematis praestetur.
Simul, axis X/Z proprium tegumentum organi habet ad structuram internam protegendam et meliorem tutelam atque effectus pulveris remotionis consequendum.
Instrumentum axis Z motum capitis laseris sursum deorsumque imprimis efficit.
Axis Z ut axis CNC ad proprium motum interpolationis peragendum adhiberi potest, et simul cum axibus X et Y coniungi, et etiam ad moderationem subsequentem commutari potest ut necessitatibus variarum rerum satisfaciat.
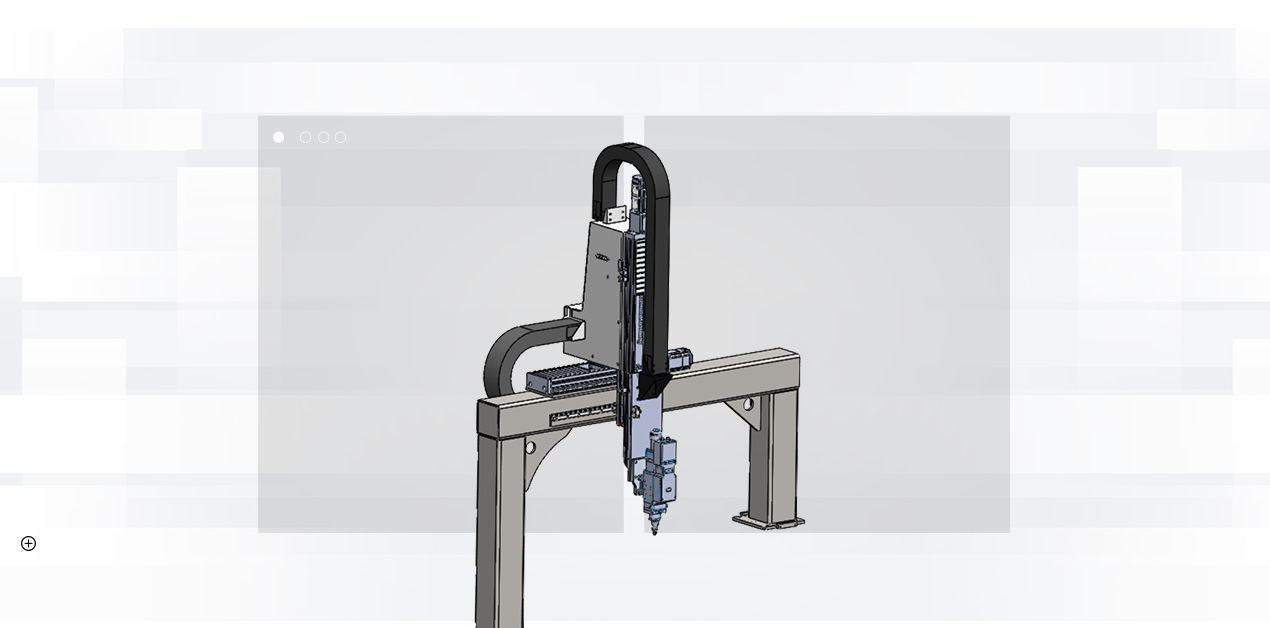
Axis-Dispositivum
Trabs transversalis instrumenti axis X structuram porticum habet, quae tubo quadrato et lamina ferrea conglutinatur. Pars portici in lecto fixa est, et axis X a servomotore impellitur ut cremaglieram et pinionem agat, ita ut motus reciprocus laminae labentis in directione X efficiatur. Dum motus fit, interruptor finis cursum moderatur ut positionem limitet, quo securitas operationis systematis praestetur.
Simul, axis X/Z proprium tegumentum organi habet ad structuram internam protegendam et meliorem tutelam atque effectus pulveris remotionis consequendum.
Instrumentum axis Z motum capitis laseris sursum deorsumque imprimis efficit.
Axis Z ut axis CNC ad proprium motum interpolationis peragendum adhiberi potest, et simul cum axibus X et Y coniungi, et etiam ad moderationem subsequentem commutari potest ut necessitatibus variarum rerum satisfaciat.
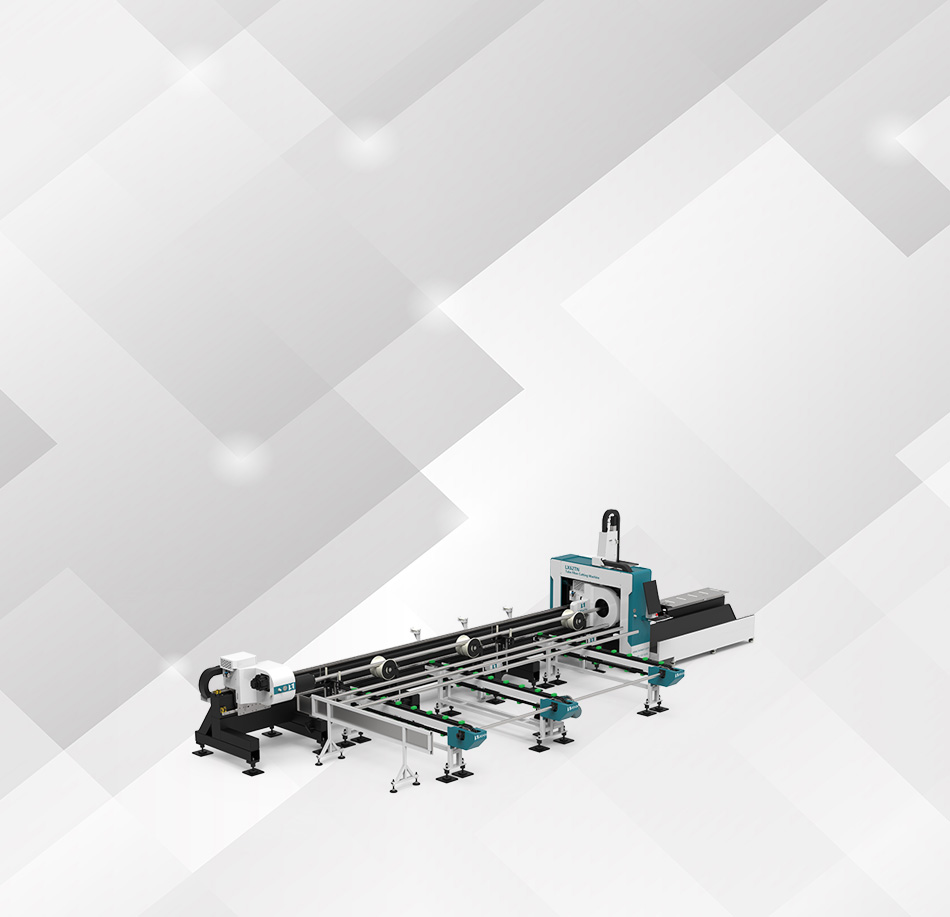
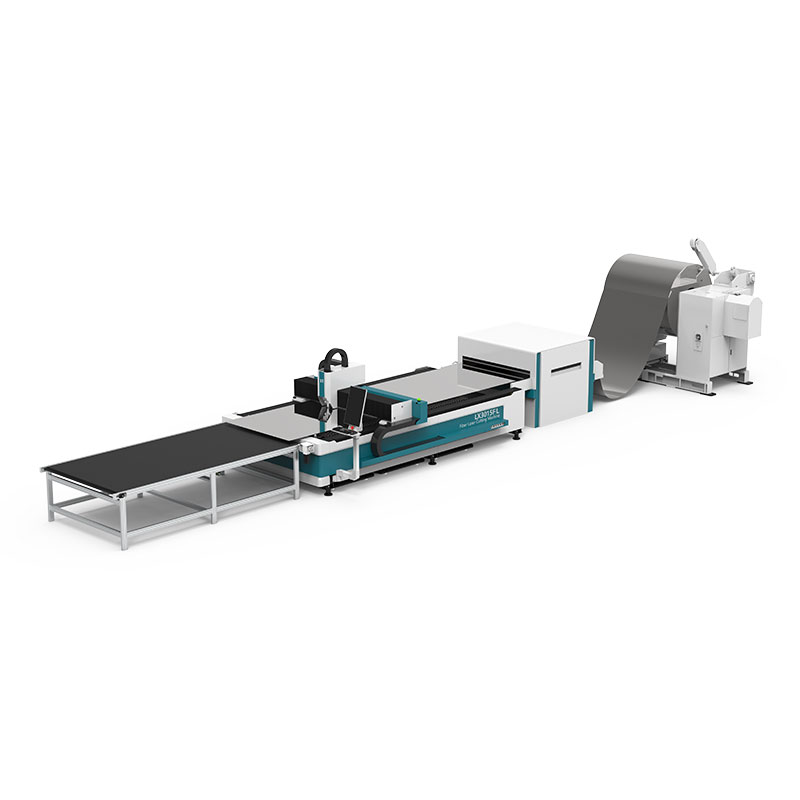
LX62TN Machina Secandi Tubos Metallicos Fibrae Laseris ad Applicationem Ferri Inoxidabilis Chalybis Carbonis
Materiae Applicationis:
Machina secandi metallum fibrae lasericae apta est ad secandum metallum, ut tubi chalybis inoxidabilis, tubi chalybis mollis, tubi chalybis carbonis, tubi chalybis mixti, tubi chalybis vernalis, tubi ferrei, tubi chalybis galvanizati, tubi aluminii, tubi cuprei, tubi aenei, tubi aenei, tubi titanii, tubi metallici, etc.
Industriae Applicationis:
Machinae secandae lasericae fibrae late adhibentur in fabricatione tabularum publicitariarum, inscriptionum publicitariarum, signorum, inscriptionum, litterarum metallicarum, litterarum LED, supellectilis culinariae, litterarum publicitariarum, tractationis tuborum metallicorum, partium et partium metallorum, ferramentorum, chassis, tractationis pluteorum et armariorum, artificiorum metallorum, supellectilis artis metallicae, sectionis tabularum elevatorum, ferramentarum, partium autocineticarum, cornicium vitri, partium electronicarum, laminarum nominum, etc.

-

LX9060QF Pretium Humile Exquisitum Compactum Fibrae Laser...
-

LX612TNA Nova Machina Semi-Automatica Onustoria Altae Velocitatis ...
-

LX3015D CNC Machina Secandi Laminam Metallicam Fibrae Laser...
-

LX3015FCT Nova Machina Secandi Laser Fibrae Unius Platformae...
-
3015FL CNC Linea Automata Plena Confectionis Coil S...
-

LX3015F Optima Machina Secandi Laminae Metallicae CNC Fibrae Laser...











